It’s difficult to say who developed the first electric car that charges it’s own batteries by coasting down a hill and having the motor become a generator.
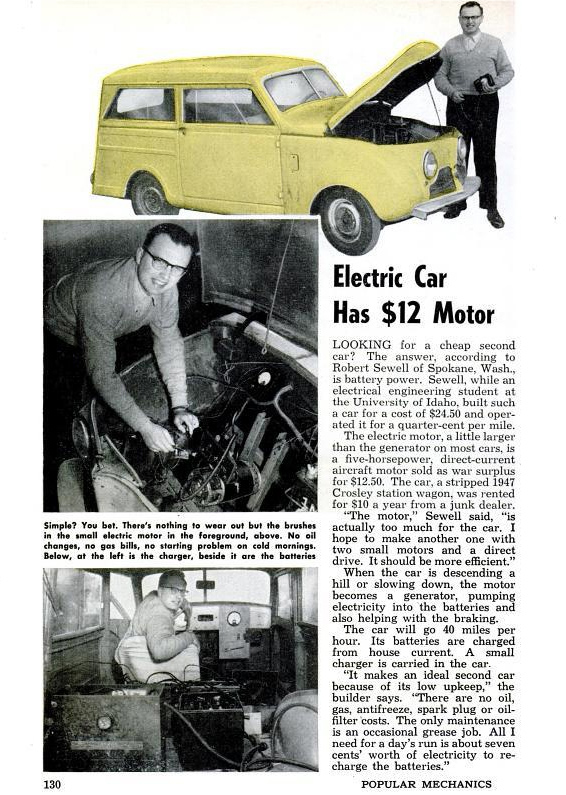
One thing is for sure, in the 1950’s, Bob Sewell, of Spokane, Washington, retrofit a 1947 Crosley Station Wagon with an aircraft starter motor that exactly accomplishes these regenerative methods and he did it as an Electrical Engineering student at the University of Idaho.
It made national news and was even featured in a full page story in the November 1957 issue of Popular Mechanics. See it here: November 1957 Popular Mechanics

In a popular article about electric cars back in 1960, which was published in the Saturday Evening Post, Bob Sewell is even mentioned in the same paragraph as the legend Charles Proteus Steinmetz. Apparently, Steinmetz had worked out the regenerative electric car back in 1913.
“As the subject heats up, ideas keep popping out: Why not put electric chargers on parking meters, an extra dime giving a parked car ten miles of recharge while it waits? Why not design the motor to become a generator going downgrade, recharging the battery and helping to brake the car? Charles P. Steinmetz, the electrical wizard, had that worked out in 1913. Robert Sewell, an engineering student at the University of Idaho last year, now with Washington Water Power, has applied this idea to an electrified Crosley station wagon.”
See the original article: Are Electric Cars Coming Back?
Bob recently passed away so there is a lot we’ll never get to share with each other in regards to some fun and exciting electrical experiments. He definitely had a sparkle in his eye when I told him about some of the work of Eric Dollard, Jim Murray and others we’re involved with. Whenever Eric Dollard stayed at my home, he parks his car in perfect view for Bob to see all the antennas on it – something Bob could appreciate as a Ham Radio operator. Bob Sewell was my neighbor.
I’ll always remember him waving at me every time he drove by my house in his little maroon PT Cruiser, literally driving about 2 miles per hour. Happy travels Bob!
Robert L. “Bob” SEWELL (06/07/1934 – 11/07/2014)
 SEWELL, Robert L. “Bob” 1934 – 2014 Passed away November 7th 2014, at his home in Spokane, WA of natural causes. His wife of 54 years, Helen (Pugh), preceded Robert in death in May 2010. Robert is survived by son Donald (Kathy Rigsby-Sewell); grandson Tyler (12); daughter Mary Ann Sewell-Driftmeyer (Todd); and Sister Barbara Sewell-Young (Steve). Robert was born June 7th, 1934 in Orofino, ID to Byron and Pauline (Holstein) Sewell. He graduated from Wallace High School in 1952 then attended the University of Idaho, working as a Hasher in Kappa Sigma Fraternity to put himself thru School. While there in Moscow, Bob built one of the World’s first electric cars which he often drove around campus and was featured in the November 1957 edition of Popular Mechanics. It was also during his time at U of I that he met his future wife, his ‘Florence Nightingale’ Nurse Helen Pugh. While home on Christmas break from College in December 1954, Bob developed Appendicitis and was rushed to the E.R. at Deaconess Hospital in Spokane where Helen just happened to be working that day and as they say…the rest was history. He married Helen Louise Pugh at the Hillyard Baptist Church on Sept. 15, 1956. After graduating from U of I in 1957 with a degree in Electrical Engineering, he worked for the Washington Water Power (Avista Corp.) from June 1957 to December 1989 when he took early retirement. In the late 1950’s/early 1960’s, Robert was instrumental in design and development of most of the region’s infrastructure of high-voltage Transmission and Distribution lines built to service the region’s burgeoning Hydroelectric Dams. He was published both regionally and nationally many times, receiving numerous awards for Inventions and patented devices. In 1970 he designed and built his and Helen’s ‘dream house’ on in north Spokane where he lived for 44 years. As Superintendent of Electric Underground and Water, Robert was a major cog in transforming the downtown core of Spokane for the World’s Fair in 1974. Robert was involved for many years in Lion’s Club, Eagles Lodge, Spokane Lilac Festival, Avista Corp. Trailblazers, U of I Alumni Association, enjoyed taking the family on Summer vacations all across the United States and boat camping at area lakes with the Spokane Yacht Club, owning and mounting accessories to unique one-of-a-kind Campers, collecting and wearing hats, was a student of history, loved reading books, loved museums, Auto Drive-away adventures, numerous excursions with Inland Empire Tours, ham radio, car shows, antique and vintage cars, jazz festivals, ‘Big Band’ music, playing in the U of I Pep Band, anything World War II, Hillyard Senior Center, the Silver Café, thrift stores, pawn shops, yard sales, classified ads, auctions and last but not least eating/food especially juice, milk, ice cream and anything chocolate! A Memorial Service will be held Friday December 12, 2014, 2:00 pm at Country Homes Christian Church, 8415 N. Wall Street (SW Corner of Wall and Country Homes Boulevard) Spokane, WA 99208 followed by fellowship time. In lieu of flowers, memorials may be made to Union Gospel Mission Ministries P.O. Box 4066 Spokane, WA 99220
SEWELL, Robert L. “Bob” 1934 – 2014 Passed away November 7th 2014, at his home in Spokane, WA of natural causes. His wife of 54 years, Helen (Pugh), preceded Robert in death in May 2010. Robert is survived by son Donald (Kathy Rigsby-Sewell); grandson Tyler (12); daughter Mary Ann Sewell-Driftmeyer (Todd); and Sister Barbara Sewell-Young (Steve). Robert was born June 7th, 1934 in Orofino, ID to Byron and Pauline (Holstein) Sewell. He graduated from Wallace High School in 1952 then attended the University of Idaho, working as a Hasher in Kappa Sigma Fraternity to put himself thru School. While there in Moscow, Bob built one of the World’s first electric cars which he often drove around campus and was featured in the November 1957 edition of Popular Mechanics. It was also during his time at U of I that he met his future wife, his ‘Florence Nightingale’ Nurse Helen Pugh. While home on Christmas break from College in December 1954, Bob developed Appendicitis and was rushed to the E.R. at Deaconess Hospital in Spokane where Helen just happened to be working that day and as they say…the rest was history. He married Helen Louise Pugh at the Hillyard Baptist Church on Sept. 15, 1956. After graduating from U of I in 1957 with a degree in Electrical Engineering, he worked for the Washington Water Power (Avista Corp.) from June 1957 to December 1989 when he took early retirement. In the late 1950’s/early 1960’s, Robert was instrumental in design and development of most of the region’s infrastructure of high-voltage Transmission and Distribution lines built to service the region’s burgeoning Hydroelectric Dams. He was published both regionally and nationally many times, receiving numerous awards for Inventions and patented devices. In 1970 he designed and built his and Helen’s ‘dream house’ on in north Spokane where he lived for 44 years. As Superintendent of Electric Underground and Water, Robert was a major cog in transforming the downtown core of Spokane for the World’s Fair in 1974. Robert was involved for many years in Lion’s Club, Eagles Lodge, Spokane Lilac Festival, Avista Corp. Trailblazers, U of I Alumni Association, enjoyed taking the family on Summer vacations all across the United States and boat camping at area lakes with the Spokane Yacht Club, owning and mounting accessories to unique one-of-a-kind Campers, collecting and wearing hats, was a student of history, loved reading books, loved museums, Auto Drive-away adventures, numerous excursions with Inland Empire Tours, ham radio, car shows, antique and vintage cars, jazz festivals, ‘Big Band’ music, playing in the U of I Pep Band, anything World War II, Hillyard Senior Center, the Silver Café, thrift stores, pawn shops, yard sales, classified ads, auctions and last but not least eating/food especially juice, milk, ice cream and anything chocolate! A Memorial Service will be held Friday December 12, 2014, 2:00 pm at Country Homes Christian Church, 8415 N. Wall Street (SW Corner of Wall and Country Homes Boulevard) Spokane, WA 99208 followed by fellowship time. In lieu of flowers, memorials may be made to Union Gospel Mission Ministries P.O. Box 4066 Spokane, WA 99220






 However, with the Halbach Array, you can. With the clever arrangement of the polarities of various permanent magnets, you can indeed get a magnet to spin inside of this field and maintain stability in the middle without it sticking to any particular spot.
However, with the Halbach Array, you can. With the clever arrangement of the polarities of various permanent magnets, you can indeed get a magnet to spin inside of this field and maintain stability in the middle without it sticking to any particular spot.



 SEWELL, Robert L. “Bob” 1934 – 2014 Passed away November 7th 2014, at his home in Spokane, WA of natural causes. His wife of 54 years, Helen (Pugh), preceded Robert in death in May 2010. Robert is survived by son Donald (Kathy Rigsby-Sewell); grandson Tyler (12); daughter Mary Ann Sewell-Driftmeyer (Todd); and Sister Barbara Sewell-Young (Steve). Robert was born June 7th, 1934 in Orofino, ID to Byron and Pauline (Holstein) Sewell. He graduated from Wallace High School in 1952 then attended the University of Idaho, working as a Hasher in Kappa Sigma Fraternity to put himself thru School. While there in Moscow, Bob built one of the World’s first electric cars which he often drove around campus and was featured in the November 1957 edition of Popular Mechanics. It was also during his time at U of I that he met his future wife, his ‘Florence Nightingale’ Nurse Helen Pugh. While home on Christmas break from College in December 1954, Bob developed Appendicitis and was rushed to the E.R. at Deaconess Hospital in Spokane where Helen just happened to be working that day and as they say…the rest was history. He married Helen Louise Pugh at the Hillyard Baptist Church on Sept. 15, 1956. After graduating from U of I in 1957 with a degree in Electrical Engineering, he worked for the Washington Water Power (Avista Corp.) from June 1957 to December 1989 when he took early retirement. In the late 1950’s/early 1960’s, Robert was instrumental in design and development of most of the region’s infrastructure of high-voltage Transmission and Distribution lines built to service the region’s burgeoning Hydroelectric Dams. He was published both regionally and nationally many times, receiving numerous awards for Inventions and patented devices. In 1970 he designed and built his and Helen’s ‘dream house’ on in north Spokane where he lived for 44 years. As Superintendent of Electric Underground and Water, Robert was a major cog in transforming the downtown core of Spokane for the World’s Fair in 1974. Robert was involved for many years in Lion’s Club, Eagles Lodge, Spokane Lilac Festival, Avista Corp. Trailblazers, U of I Alumni Association, enjoyed taking the family on Summer vacations all across the United States and boat camping at area lakes with the Spokane Yacht Club, owning and mounting accessories to unique one-of-a-kind Campers, collecting and wearing hats, was a student of history, loved reading books, loved museums, Auto Drive-away adventures, numerous excursions with Inland Empire Tours, ham radio, car shows, antique and vintage cars, jazz festivals, ‘Big Band’ music, playing in the U of I Pep Band, anything World War II, Hillyard Senior Center, the Silver Café, thrift stores, pawn shops, yard sales, classified ads, auctions and last but not least eating/food especially juice, milk, ice cream and anything chocolate! A Memorial Service will be held Friday December 12, 2014, 2:00 pm at Country Homes Christian Church, 8415 N. Wall Street (SW Corner of Wall and Country Homes Boulevard) Spokane, WA 99208 followed by fellowship time. In lieu of flowers, memorials may be made to Union Gospel Mission Ministries P.O. Box 4066 Spokane, WA 99220
SEWELL, Robert L. “Bob” 1934 – 2014 Passed away November 7th 2014, at his home in Spokane, WA of natural causes. His wife of 54 years, Helen (Pugh), preceded Robert in death in May 2010. Robert is survived by son Donald (Kathy Rigsby-Sewell); grandson Tyler (12); daughter Mary Ann Sewell-Driftmeyer (Todd); and Sister Barbara Sewell-Young (Steve). Robert was born June 7th, 1934 in Orofino, ID to Byron and Pauline (Holstein) Sewell. He graduated from Wallace High School in 1952 then attended the University of Idaho, working as a Hasher in Kappa Sigma Fraternity to put himself thru School. While there in Moscow, Bob built one of the World’s first electric cars which he often drove around campus and was featured in the November 1957 edition of Popular Mechanics. It was also during his time at U of I that he met his future wife, his ‘Florence Nightingale’ Nurse Helen Pugh. While home on Christmas break from College in December 1954, Bob developed Appendicitis and was rushed to the E.R. at Deaconess Hospital in Spokane where Helen just happened to be working that day and as they say…the rest was history. He married Helen Louise Pugh at the Hillyard Baptist Church on Sept. 15, 1956. After graduating from U of I in 1957 with a degree in Electrical Engineering, he worked for the Washington Water Power (Avista Corp.) from June 1957 to December 1989 when he took early retirement. In the late 1950’s/early 1960’s, Robert was instrumental in design and development of most of the region’s infrastructure of high-voltage Transmission and Distribution lines built to service the region’s burgeoning Hydroelectric Dams. He was published both regionally and nationally many times, receiving numerous awards for Inventions and patented devices. In 1970 he designed and built his and Helen’s ‘dream house’ on in north Spokane where he lived for 44 years. As Superintendent of Electric Underground and Water, Robert was a major cog in transforming the downtown core of Spokane for the World’s Fair in 1974. Robert was involved for many years in Lion’s Club, Eagles Lodge, Spokane Lilac Festival, Avista Corp. Trailblazers, U of I Alumni Association, enjoyed taking the family on Summer vacations all across the United States and boat camping at area lakes with the Spokane Yacht Club, owning and mounting accessories to unique one-of-a-kind Campers, collecting and wearing hats, was a student of history, loved reading books, loved museums, Auto Drive-away adventures, numerous excursions with Inland Empire Tours, ham radio, car shows, antique and vintage cars, jazz festivals, ‘Big Band’ music, playing in the U of I Pep Band, anything World War II, Hillyard Senior Center, the Silver Café, thrift stores, pawn shops, yard sales, classified ads, auctions and last but not least eating/food especially juice, milk, ice cream and anything chocolate! A Memorial Service will be held Friday December 12, 2014, 2:00 pm at Country Homes Christian Church, 8415 N. Wall Street (SW Corner of Wall and Country Homes Boulevard) Spokane, WA 99208 followed by fellowship time. In lieu of flowers, memorials may be made to Union Gospel Mission Ministries P.O. Box 4066 Spokane, WA 99220





