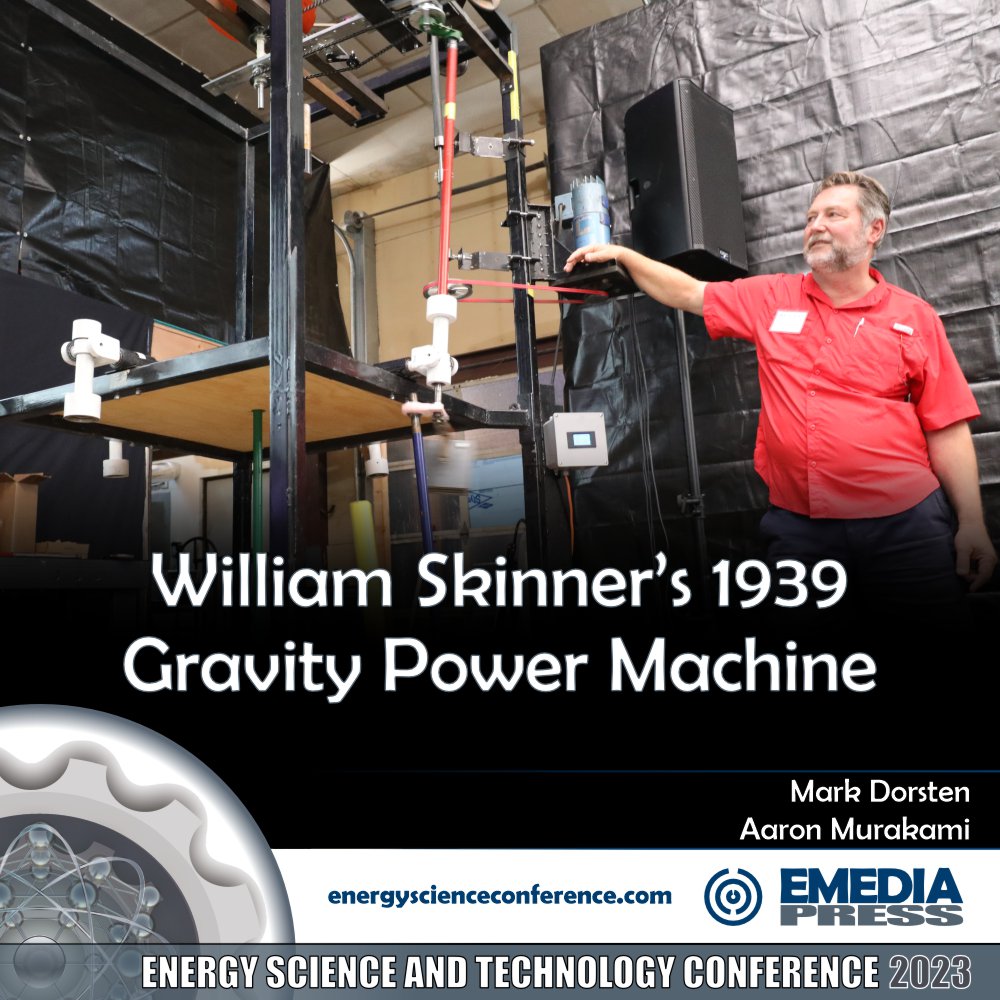
Over 80 years ago, William Skinner built a machine that uses gravity as a source of potential to amplify the input into his machine at a claimed increase of 1200%.
From the video evidence, this appears to be greatly understated. It is commonly thought that gravity is static and can do no work, but understanding the true nature of the dynamic properties of gravity, gravity is definitely a source of potential that can be used.
This machine has been discussed for many years on Energetic Forum and elsewhere. Aaron was the first to point out the obvious fact that Skinner’s input mechanism was of an elliptical nature but virtually every replication attempt posted online by independent builders have a circular input mechanism. Even the old news releases announcing Skinner’s machine clearly states that the “eccentrics”, which are the elliptical input mechanisms, are part of the secret.
Mark and Aaron are the only ones that appear to be attempting a replication using this eccentric input method rather than the circular input that has failed everyone else. The full scale model completely built by Mark that will be displayed is still under construction without any claims given.
This presentation aims to clearly show the evidence of Skinner’s eccentric input from the original 1939 video, which Aaron has pointed out multiple times in the past on YouTube and in Energetic Forum but has remained wholly ignored by the builders as well as pointing out once again what the original news releases describe, which matches what is obvious in the video.
William Skinner’s 1939 Gravity Power Machine
Over 80 years ago, William Skinner built a machine that uses gravity as a source of potential to amplify the input into his machine at a claimed increase of 1200%. From the video evidence, this appears to be greatly understated. It is commonly thought that gravity is static and can do no work, but understanding the true nature of the dynamic properties of gravity, gravity is definitely a source…
Veljko’s 2-stage oscillator is an amazing device that produces more mechanical work than it takes to run the device. It’s in use by hundreds of companies around the world pumping water, grinding grain, etc.
For the last couple years, I’ve been in contact with Mr. Ihab Seidy from Singapore. His company Transkinect has been involved in various technologies that take advantage of the kinetic movement of mass in novel ways to produce more mechanical work on the output than what is thought to be required on the input.
This rotary converter’s associated claim and intention is to place it between a prime mover and a generator for the purposes of increasing the mechanical output with claims up to 500% more mechanical output than electrical input.
Here are a few bulletpoints from their website:
This Space energy technology is opening new horizons for abundant source of clean energy can be tapped from the space .
“ PowerMaximizer “ a Smart Mechanical device the first kind works as mechanical Load absorber , should be installed in-between any mechanical power source and load for example ( in between electrical motor and water pump , in between combustion engine and drivetrain , in between wind turbine torque and Alternator )
The main technical advantages of the power Maximizer as follows :
Absorb 70-80% from the mechanical load continuously , therefor only 20-30% from the load can be reflected or transferred to input power source .
Increase mechanical output torque 2-10 times ( without any impact on input speed source )
Increase overall power output 100-500%
Mr. Seidy has expressed interest in bringing a demonstration unit to the 2020 Energy Science & Technology for everyone to examine and measure to their satisfaction.
Gravity Control with Present Technology by David Alzofon
This live call with David Alzofon is * JAM PACKED * with a lot of specifics about his father Dr. Frederick Alzofon’s Gravity Control technology. Literally, this is probably the most important free recording on the internet about real technology that can control gravity because it is based on something proven in 1994 instead of speculation or wishful thinking about what might work.
David explains the process of Dynamic Nuclear Orientation, which is the key to the process and other aspects of the technology. There are also some very specific questions about the technology from some callers that are answered in detail.
In this video of the call (pictures are added to make a slideshow of it), there are a lot of references and a few items that were not included in the Gravity Control book.
The official site dedicated to this technology is http://gravitycontrol.io and below are two previous blog posts about this subject. Below those is the video of the call with the slideshow.
Please share this important call with your friends with the share buttons below and make sure to subscribe to YouTube channel for more videos like this.
Gravity Control with Present Technology by David Alzofon
If you’re technically oriented, particularly if you have a background in electrical engineering, you’ll find gravity control easy to understand. And if you’re familiar with the rocky history of alternative energy development, you will quickly see that gravity control is a gateway technology — not only for easy access to space and a complete overhaul of terrestrial transportation — but for the liberation of free energy technologies. And yet, contrary to expectations, it is likely to be embraced by major corporate interests, simply because it provides a way out of their current problems and into even greater profits in the future. In fact, the profit potential of gravity control absolutely dwarfs anything powering today’s economy.
Get 25% off with this coupon code for a limited time: GRAVITY25
The technology is easy to understand. It begins with a new, physical model of the origin of the gravitational force, which is not provided by Einstein’s general theory of relativity. Dr. Alzofon’s model, which meets all the rigorous requirements of a scientific theory, is based on his experience under professors such as J. Robert Oppenheimer, David Bohm, Victor Lenzen, and Griffith C. Evans at Cal Berkeley from 1942 to 1956, as well as experimental work he conducted at the cyclotron (published in Physical Review). In 1960, an Air Force survey of gravitation research worldwide since the time of Newton concluded that Alzofon’s theory was the only one that had a prayer of a technological application (bibliography in Gravity Control with Present Technology). The only one.
Gravity control is easily derived from the model of the gravitational force. The technology resembles a well-known cryogenic process, but operates on a subatomic level on random electrodynamic processes held to be responsible for gravitation. Essentially, it “freezes” (lowers the energy level) of the gravitational field through cyclic application of microwave pulses, which orients the heavy nuclei of paramagnetic materials, such as aluminum. In combination with a constant magnetic field, microwave impulses induce a pumping action that is repeated thousands of times per second, depleting the energy in the gravitational field more and more until a “cascade point” is reached and gravity and inertia vanish almost altogether (the endpoint is comparable to 1/10th of 1 degree Kelvin, by analogy). Since the pumping effects are cumulative, the total energy required to make a vehicle weightless and inertia free is very small (exact calculations are given in the book).
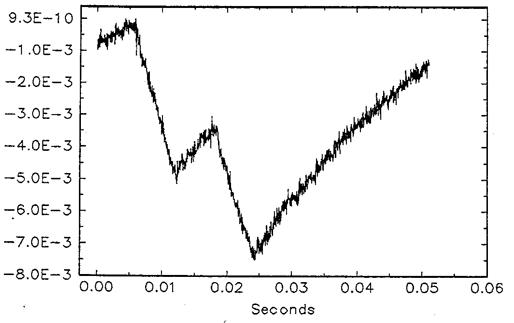
The chart below was computer-generated during the 1994 experiment. The vertical axis tracks weight and the horizontal axis tracks time. The weight began to plummet the moment the system was switched on.
Initially we see a slight spike in weight. Then the weight drops. As the cycle repeats, the weight spikes again slightly, but the loss deepens even further after the second spike. This descending saw-tooth pattern was highly significant, as it was predicted in Dr. Alzofon’s model of gravity control before the apparatus was ever turned on. When the power to the system is cut, the weight of the test object slowly and smoothly returns to normal. This occurs as the Earth’s gravitational field, temporarily held in abeyance, returns to disorient the electrodynamic activity surrounding the nuclei of the sample. As you can see, the weight loss is cumulative, not instantaneous. This is the beauty of the technology, because it means a low power investment applied cyclically can be leveraged into a tremendous weight loss in a relatively short time.
Get 25% off with this coupon code for a limited time: GRAVITY25
Think of the implications: Weightless craft will be able to exit the Earth’s gravitational field at any speed, even as slowly as a weather balloon, with very little fuel expenditure. Traditional rocketry, with all of its limitations and drawbacks, flies out the window. This means the conquest of the space frontier and a new frontier for economic development. The same technology can be applied to terrestrial transportation. How would you like to commute to work at Mach 2, with no traffic jams or stoplights? Since inertia is also removed by gravity control, vehicles will be able to stop and start instantaneously, as well as turn on a dime (no g force). And, as millions of people, rather than a few lonely astronauts or well-heeled billionaires, share the experience of viewing the Earth from space, what will happen to our perception of ourselves and our place in the cosmos?
Keep in mind that the technology is not theoretical: it was experimentally proven in 1994. After that, Dr. Alzofon kept it a closely guarded secret until his death in 2012. Following his father’s death, David Alzofon — who had watched while the technology languished in obscurity ever since 1981, the date of his father’s full-disclosure lecture in Colorado Springs — decided the time for waiting was over. Humanity could not endure another ten years of the current paradigm, with its built-in spiral of doom, when a new technology was already available that would bring about the dawn of a new age. He correctly saw that there was nothing to fear from the new technology: It would simply evolve on a course parallel to the development of aerodynamic flight, and like aerodynamic flight, it would confer enormous benefits, but on a much, much larger scale. Weaponization? There is nothing destructive about gravity control. Liberating? Yes. Domineering? Not when it is developed equally on all sides.
So, abandoning any thought of personal gain, he decided to do all he could to publicize the technology. He opened the books on the 1994 experiment in hopes of encouraging replications of the experiment with improved digital equipment by responsible scientists and entrepreneurs, thereby ensuring its dissemination into the mainstream of science and engineering. Already, there are signs that his strategy is working. And, as he amply demonstrates in the book, if the technology works, the moneymaking opportunities are astronomical. Dr. Alzofon assessed the value of his invention as equal to the combine GDP of all the industrial nations on earth within ten years of its debut. Control of climate change is just a side benefit.
Since the dawn of history, gravity and inertia have been regarded as more inevitable than death or taxes. The discovery of gravity control is on a par with the discovery of fire or the wheel. It is not only vitally important for the advancement of science, but for the evolution of mankind, as it opens the door to the final frontier: space.
Veljko Milkovic’s mechanical amplifier known as a 2-Stage Mechanical Oscillator is one of the simplest true overunity machines that most people can build. Using some very clever innovations in pendulum mechanics, it allows gravitational potential to contribute to real mechanical work.
At the 2015 Energy Science & Technology Conference, Veljko Milkovic’s team was kind enough to provide a video presentation, which is a compilation of much of his work relating to this machine as well as other pendulum concepts.
This machine is not theoretical – it works and is being used not just as an experimental device, but as a water pump in low income areas. It allows more water pumping work to be done than the operator has to input into the pendulum themselves. Again, demonstrating simply that gravity is a source of energy contrary to the mainstream belief.
Wait until you see the demonstration in the video with the flashlights!
The Veljko Milkovic Research & Development Center has produced a couple books highlighting some of their research in these areas.
The first is called Basic Principles of Overunity Electromagnetic Machines by by Jovan Marjanovic, M.Sc.
The goal of this book is to unlock the secrets of over unity and to teach people what is over unity and how it works. The reader will learn basic ideas of making new ultra efficient electric motors and generators and how to improve existing patents which use permanent magnets.
The second books relating to gravity power is Gravitational Machines by Veljko Milkovic.
This is the story of the discoveries, which have been hidden from us for a long time, and were dismissed as science-fiction, until nowadays when breakthrough inventions are receiving awards, appraisals and objective criticism, but also dogmatic a priori attacks.
Perhaps it is time to change the perspective since new ideas and materials brought about breakthroughs in gravitational machines which are fully functional and can be used for various purposes.
The aim of this book is to present as many facts as possible, which will lead us to the light at the end of the tunnel.
There are various mechanisms that can cause the top of the input lever of the 1939 Gravity Power machine by William F. Skinner to move in an elliptical orbit.
A simplified method that I came up with is by using a tilted wheel with a connection offset from center. Although from it’s own plane, it is a full circle, on the horizontal plane, it will trace an ellipse.
Here are some various comments I made about this Skinner Machine:
Sun, Earth, Moon
The relationship of the upper weight to the lower weight shaft is like the MOON and EARTH. The Earth rotates on its own axis while the Moon does not. However, as the Earth moves through space once around its axis of rotation around the SUN (lever), the moon has made one rotation. In a year is a day and the Earth goes around the Sun one time per day, the Moon has spun 360 degrees in that one day while all the time showing it’s same side to the Earth.
If you took a string with a weight on the end, held it out and turned in a circle, the string would stretch out and the weight would go out and be held by the string. As you turned around in circles on your own axis, the same side of the weight is facing you so to you it is not rotatig on its own axis, however, with each one rotation you make on your own axis, the weight (moon) has indeed revolved 360 degrees in space.
I don’t want to get too much into all of that right now, but something to think about. The whole Skinner mechanism is like the Sun, Earth and Moon where it takes one day for the Earth to revolve around the Sun and the Moon always stays in the same position relative to the Earth and Sun like the 3 points of a right angle triangle and the hypotenuse is from the Sun to Moon and the right angle is at the Earth..
Not a perfect analogy but the principles are all there.
The first force in the Skinner machine is the electric motor, which is mechanical work to turn pulleys by belts to move the mechanism that rotates the input lever in an elliptical motion. The whole machine has multiple levels of leveraging leverage so to speak.
That motor doesn’t need to supply very much work to turn the top of the lever around in an elliptical way because the pivot is way down at the bottom of that level – with let’s say 90% of the length of the lever above the pivot, very little is needed because of the mechanical advantage of the length of the lever.
“Give me a lever long enough and a fulcrum on which to place it, and I shall move the world.” – Archimedes quotes (Mathematician and inventor of ancient Greece, 280-211bc)
That is probably one of a hundred variations of that quote but that’s the point.
The bottom of that “input lever” connected to the translation coupler with coupler freely spinning around it serves as the center axis of rotation for BOTH the upper weight fixed to that coupler plate and the upper part of the lower shaft connected the the coupler plate, which also spins freely from the coupler plate. They both rotate in perfect circles around the bottom of the input lever. But they of course go in an elliptical orbit because that center of axis (bottom part of input lever) for both the upper weight upper part of the lower shaft is moving in the same ellipse as the upper part of the input lever, but just inverse but in the same direction of rotation.
The force imparted by the bottom of the lever to move that part of the translation coupler causes a reaction in the upper weight to whip around in the same direction that the input lever is going – like I showed in the graph paper demo (coupler plate demo – not the upper input mechanism demo). That reaction is possible because of the specific placement of the input lever on the plate in relation to the upper weight placement and lower shaft placement on the plate as well. If the upper weight was on the other side or if the lever was turned in the opposite direction, you lose the effect and try to run the machine backwards.
So the force that gets the upper weight to swing around is directly from the input lever. Once it gets going, it obviously has momentum and when up to speed, the input lever only has to make up for the loss on each rotation, which is almost nothing with no load and still only a small percentage under load.
As the upper weight moves together with the small input of the lever just to maintain that momentum, the lower shaft’s upper part follows it and the center of gravity for the lower weight is constantly moved so it has to constantly fall to the new center of gravity, which it can’t catch up to.
Now look at the whole vertical drive as one unit. The lower shaft and weight are held slightly off center by being held in the translation coupler and that translation coupler is held in place by being connected to the bottom of the input lever. If the input lever is perfectly vertical, it will be perfectly over the bottom part of the lower shaft where the output is. However, although they are in alignment when centered, the lower weight is not because it is off center and an angle dictated by the lower shafts upper connection distance from the lever rod.
If no force was given by the input lever, no matter how small is being input to it at the very top, the whole machine would slow down so it absolutely contributes it’s force to whip the upper weight, which whips the lower shaft around.
Going back to looking at the whole vertical drive assembly, that lower weight is is only a few inches from being balanced…not balanced by the lower shaft being vertical of course, but by having the lower weight angled back instead of tipping forward.
Of course tipping it back would just cause it to freespin around until it is on the incline of the shaft, but we’re looking at where is the center of gravity for the mass of the lower weight and shaft and that is what is important. seeing that they are close to being balanced, it doesn’t take much force to rotate it with this mechanism. Once it is up to speed, the mass is spinning around, which is not locked to the shaft where it is connected to the translation coupler, but it is locked to the part of the shaft that goes out the bottom to pull work from.
That mass spinning around will create some serious torque and it doesn’t take much to get that mass spinning. The bigger the mass, the slower it has to go to produce the same amount of torque. If we had a lower weight the size of a school bus, it could go so slow that at only a couple rotations per minute but would snap a crowbar like a toothpick.
Once the system is synchronized and everything is spinning away, all the momentum of the lower weight and upper weight relieve the input requirement on the input lever so only the loss has to be made up.
Input lever force to kick translation coupler > translation coupler gets this force and helps to kick the upper weight around > that helps to move the shaft to move the lower weight around.
I do want to comment on some comments I’ve seen. Some say it is not gravity, it is the centrifugal force of the lower weight – some are saying it is only gravity, etc… it is all of them combined.
The weight spinning has some serious forces but gravitational potential energy is constantly being turned into rotational mechanical work at the lower weight so it is a combination of both in addition to the input from the input lever. If gravity does not contribute, you then have a closed equilibrium system that is solely reliant on the input to the lever for it’s source potential and it would have no gain.
WHEN ASKED IF AN ELLIPTICAL ORBIT WAS NECESSARY
Yes – it needs to be elliptical. I have worked out multiple ways to cause the input lever to be moved in an ellipse at the top but keep coming back to Skinner’s method as being the best.
In a circular orbit, you get no real reversal or reaction.
With an elliptical orbit, you get a strong one every 180 degrees – at each end of the length – but instead of that reactive power bucking the system, it actually propels it forward.
This machine is a mechanical version of Jim Murray’s SERPS machine in principle but it applies to every machine that takes a reaction and uses it to continue to produce work in the forward direction instead of resisting the production of work.
Newton’s 3rd law of motion is always misunderstood and claimed to be an equal and opposite reaction when in reality, the truth is that the forces are divided between two reference points.
For anyone that isn’t caught up in dogmatic myths, there is no equal and opposite reaction in both elliptical mechanism in the machine thereby violating Newton’s 3rd law of motion the way it is commonly taught because if it applied, each half cycle of the ellipse would buck against the forward motion but it doesn’t – it assist the machine in the forward direction.
It is mechanical jujitsu – using a force that could be in opposition to you but you allow for a method to let it help the progress continue in its same direction. The SERPS machine is electrical jujitsu.
This is the same in the Ramos machine and the Veljko machine as well as mechanical amplifiers designed by Peter Lindemann and some that I’ve even come up with myself. It is a universal principle that applies to EVERY mechanical machine that turns reactive power into positive work in positive time.
So yes, absolutely, it needs to be an elliptical path as a circle will only cause equilibrium in the machine and that is what we want to stay far away from.
This video is the FULL VERSION of all my 3 videos put together in one place. It shows the reverse engineered details of William Frank Skinner’s 1939 Gravity Power Machine. Watch the video from 1939 to see the original here: http://emediapress.com/2014/05/30/1200-gravity-power/ to see what this video is about.