Gravity Control with Present Technology by David Alzofon
This live call with David Alzofon is * JAM PACKED * with a lot of specifics about his father Dr. Frederick Alzofon’s Gravity Control technology. Literally, this is probably the most important free recording on the internet about real technology that can control gravity because it is based on something proven in 1994 instead of speculation or wishful thinking about what might work.
David explains the process of Dynamic Nuclear Orientation, which is the key to the process and other aspects of the technology. There are also some very specific questions about the technology from some callers that are answered in detail.
In this video of the call (pictures are added to make a slideshow of it), there are a lot of references and a few items that were not included in the Gravity Control book.
The official site dedicated to this technology is http://gravitycontrol.io and below are two previous blog posts about this subject. Below those is the video of the call with the slideshow.
Please share this important call with your friends with the share buttons below and make sure to subscribe to YouTube channel for more videos like this.
John Hutchison who is known for the “Hutchison Effect” is making his collection of rare artifacts available for sale through Ebay.
The Hutchison Effect is the result of mixing some high frequency, high voltage effects and transmitting them into metal. This also is related to some anti-gravity demonstrations where objects lose weight and levitate upwards by this same effect. Some metal turns to jelly, some metal appears to have occupied the same space with another object and then solidifies into one piece and other strange effects including transmutation of elements.
This has been studied by many independent labs and even the U.S. Military has studied this without a satisfactory explanation even offering up the possibility that John Hutchison is causing these effects with some unintended or unknown telekinetic ability.
John is trying to raise the funds for something he recently acquired overseas (possibly details on that coming later) by making offering up these samples for sale as well as a lot of his electronic equipment. The collection is available here: https://www.ebay.com/sch/m.html?_ssn=johnkhutchison&_ipg=200&rt=nc
Gravity Control with Present Technology by David Alzofon
If you’re technically oriented, particularly if you have a background in electrical engineering, you’ll find gravity control easy to understand. And if you’re familiar with the rocky history of alternative energy development, you will quickly see that gravity control is a gateway technology — not only for easy access to space and a complete overhaul of terrestrial transportation — but for the liberation of free energy technologies. And yet, contrary to expectations, it is likely to be embraced by major corporate interests, simply because it provides a way out of their current problems and into even greater profits in the future. In fact, the profit potential of gravity control absolutely dwarfs anything powering today’s economy.
Get 25% off with this coupon code for a limited time: GRAVITY25
The technology is easy to understand. It begins with a new, physical model of the origin of the gravitational force, which is not provided by Einstein’s general theory of relativity. Dr. Alzofon’s model, which meets all the rigorous requirements of a scientific theory, is based on his experience under professors such as J. Robert Oppenheimer, David Bohm, Victor Lenzen, and Griffith C. Evans at Cal Berkeley from 1942 to 1956, as well as experimental work he conducted at the cyclotron (published in Physical Review). In 1960, an Air Force survey of gravitation research worldwide since the time of Newton concluded that Alzofon’s theory was the only one that had a prayer of a technological application (bibliography in Gravity Control with Present Technology). The only one.
Gravity control is easily derived from the model of the gravitational force. The technology resembles a well-known cryogenic process, but operates on a subatomic level on random electrodynamic processes held to be responsible for gravitation. Essentially, it “freezes” (lowers the energy level) of the gravitational field through cyclic application of microwave pulses, which orients the heavy nuclei of paramagnetic materials, such as aluminum. In combination with a constant magnetic field, microwave impulses induce a pumping action that is repeated thousands of times per second, depleting the energy in the gravitational field more and more until a “cascade point” is reached and gravity and inertia vanish almost altogether (the endpoint is comparable to 1/10th of 1 degree Kelvin, by analogy). Since the pumping effects are cumulative, the total energy required to make a vehicle weightless and inertia free is very small (exact calculations are given in the book).
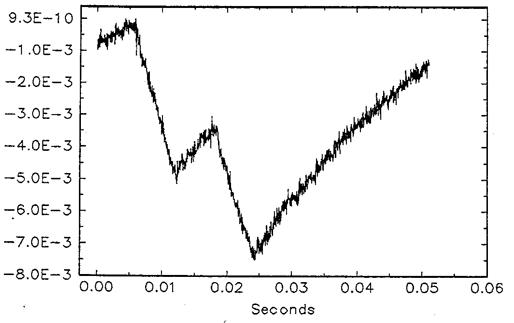
The chart below was computer-generated during the 1994 experiment. The vertical axis tracks weight and the horizontal axis tracks time. The weight began to plummet the moment the system was switched on.
Initially we see a slight spike in weight. Then the weight drops. As the cycle repeats, the weight spikes again slightly, but the loss deepens even further after the second spike. This descending saw-tooth pattern was highly significant, as it was predicted in Dr. Alzofon’s model of gravity control before the apparatus was ever turned on. When the power to the system is cut, the weight of the test object slowly and smoothly returns to normal. This occurs as the Earth’s gravitational field, temporarily held in abeyance, returns to disorient the electrodynamic activity surrounding the nuclei of the sample. As you can see, the weight loss is cumulative, not instantaneous. This is the beauty of the technology, because it means a low power investment applied cyclically can be leveraged into a tremendous weight loss in a relatively short time.
Get 25% off with this coupon code for a limited time: GRAVITY25
Think of the implications: Weightless craft will be able to exit the Earth’s gravitational field at any speed, even as slowly as a weather balloon, with very little fuel expenditure. Traditional rocketry, with all of its limitations and drawbacks, flies out the window. This means the conquest of the space frontier and a new frontier for economic development. The same technology can be applied to terrestrial transportation. How would you like to commute to work at Mach 2, with no traffic jams or stoplights? Since inertia is also removed by gravity control, vehicles will be able to stop and start instantaneously, as well as turn on a dime (no g force). And, as millions of people, rather than a few lonely astronauts or well-heeled billionaires, share the experience of viewing the Earth from space, what will happen to our perception of ourselves and our place in the cosmos?
Keep in mind that the technology is not theoretical: it was experimentally proven in 1994. After that, Dr. Alzofon kept it a closely guarded secret until his death in 2012. Following his father’s death, David Alzofon — who had watched while the technology languished in obscurity ever since 1981, the date of his father’s full-disclosure lecture in Colorado Springs — decided the time for waiting was over. Humanity could not endure another ten years of the current paradigm, with its built-in spiral of doom, when a new technology was already available that would bring about the dawn of a new age. He correctly saw that there was nothing to fear from the new technology: It would simply evolve on a course parallel to the development of aerodynamic flight, and like aerodynamic flight, it would confer enormous benefits, but on a much, much larger scale. Weaponization? There is nothing destructive about gravity control. Liberating? Yes. Domineering? Not when it is developed equally on all sides.
So, abandoning any thought of personal gain, he decided to do all he could to publicize the technology. He opened the books on the 1994 experiment in hopes of encouraging replications of the experiment with improved digital equipment by responsible scientists and entrepreneurs, thereby ensuring its dissemination into the mainstream of science and engineering. Already, there are signs that his strategy is working. And, as he amply demonstrates in the book, if the technology works, the moneymaking opportunities are astronomical. Dr. Alzofon assessed the value of his invention as equal to the combine GDP of all the industrial nations on earth within ten years of its debut. Control of climate change is just a side benefit.
Since the dawn of history, gravity and inertia have been regarded as more inevitable than death or taxes. The discovery of gravity control is on a par with the discovery of fire or the wheel. It is not only vitally important for the advancement of science, but for the evolution of mankind, as it opens the door to the final frontier: space.
David Alzofon is a technical writer and the son of Dr. Frederick Alzofon (1919 – 2012), inventor of gravity control. David is presenting at the 2018 Energy Science & Technology Conference.
From the mid-1950s through 2012, he had a ringside seat to the development of the technology, and actively searched for investors in Silicon Valley from 1981 through 2012, which could be the topic of a lecture in itself.
In the six years following his father’s death, he has ramped up efforts to publicize his father’s discoveries with the publication of two books: How to Build a Flying Saucer (And Save the Planet) and The Top-Ten UFO Riddles – Solutions from Science. The first book has been re-released under a new title: Gravity Control With Present Technology
More than anyone alive he understands the theoretical basis of the technology and why it has met with so much resistance from establishment physics, in spite of being endorsed in a 1960 report by the U.S. Air Force and the overwhelmingly favorable impression his father, who received his doctorate at Cal Berkeley, made upon knowledgeable critics.
Dr. Paul LaViolette is one of the leading authorities on antigravity technologies and has worked with some of the most advanced researchers in the field. He is the founder of the Starburst Foundation and has authored many papers and books including the popular Secrets of Antigravity Propulsion.
As a conventionally trained scientist, he was employed by the US Patent Office and was wrongfully terminated. He fought back and had the anti-discriminatory laws changed so that they could no longer fire anyone for their scientific beliefs. He is a champion for free thought and has certainly proved this by his development of Sub Quantum Kinetics – SQK – a model that appears to be able to answer many of the underlying mechanisms of seemingly complex subjects.
Dr. LaViolette beings with a discussion on the Sun Cell developed by Black Light Power Corp., a technology that could one day power and heat our home. It is able to capture energy released in water from the transition of hydrogen atom orbital electrons to subground energy states. While this behavior is not anticipated by standard quantum theory, the novel physics methdology of subquantum kinetics (SQK) does allow this.
At the same time SQK can explain the operation of the Nassikas superconducting magnetic thruster, a device which per unit thrust weight provides over 1000 times more thrust than NASA’s NSTAR ion thruster with no energy consumption. The Nassikas thruster can get us to the stars.
 John Hutchison who is known for the “Hutchison Effect” is making his collection of rare artifacts available for sale through Ebay.
John Hutchison who is known for the “Hutchison Effect” is making his collection of rare artifacts available for sale through Ebay.