Here’s the latest video interview with Eric Dollard sharing how he became involved with the Integratron and other details most people haven’t heard about. This live call was on 2025-07-12.
This is the highest COP replication of a known working overunity system, posted in a public forum, that I know of. Congratulations to Donald H. and we are looking forward to more positive results. I’d recommend reading the entire discussion thoroughly if you want to know how to verify what your system is actually producing. In a way, this is actually historical – not a proven overunity system itself, but a replication with more coming. Although Mike’s self-sustains with higher output, anything over 1.0 COP proves the point and 4.5 is well beyond proving the point.
It’s also easier than one might think. It’s important to discard any myths that a system must completely self sustain or self run in order to show over 1.0 COP performance. On these kind of systems, what is important is to do a discharge test on the batteries to see what their actual capacity is in terms of amps and time. Then, if you can exceed the amperage draw for the hours you would get from both your input and output banks since that is what you’re starting with, then you’ve succeeded.
Thane Heins contacted me to present his RegenX Motor and Generator technology with a claim of infinite COP. I’m aware of his work over the years, the claims, etc. and I will reserve judgement on the validity of such claims.
My condition is that he allows me to pick my own experts to independently measure/validate his claims at the conference live in front of the attendees on possibly Wed or Thur of the conference, a few days before he presents.
Regardless of what the testing shows, he is still welcome to present and everyone can make up their own mind.
The test results will be included with the video presentation made available after it goes into the Emediapress.com catalog.
“For validation, it must be completed by my own experts.” – Aaron Murakami
“NO PROBLEM BUT WE OUGHT TO START RIGHT AWAY… GET YOUR TEAM ON THIS ASAP – DOOMSDAY CLOCK IS TICKING!” – Thane Heins
He agreed so I’ll expect him to honor his word as himself just as I do. I have declined his offer to provide me with his own third party testing validation. It must be with experts of my own choosing and the attendees will have an opportunity to learn proper testing procedures to verify input vs output. It will be done with accepted standards and methods that apply equally to both over and under 1.0 COP rotating machines.
Please donate to EPD Laboratories, Inc., 501(c)3 non-profit. All donations are tax deductible. Donation info is in the right column at https://ericpdollard.com
For an authoritative presentation covering the topic in the below video, go here:
On Dec 12, 2021, we held a live call where Eric Dollard addressed the Veritasium video in detail. After this topic is discussed, other topics were discussed. Listen to the call with a slideshow here:
Here is the second of two live calls from last year that were never released. There are two new ones but they will be posted in sequential order – soon.
This call covers a lot of topics so watch it here below – it’s 1 hour 41 minutes long.
Make sure to subscribe to my YouTube channel and give the video a like!
Make sure to help support EPD Laboratories, Inc. – donation info is available in the right column of https://ericpdollard.com
Dr. Robert Adams is someone that most “newer” people in the “Free Energy” scene have never heard of although he is one of the Pioneers of the modern-day movement, which deals a lot with pulsed systems.
His electric motor/generator systems have shown to produce more work than the operator has to supply and it was Peter Lindemann that corresponded with him longer than anyone else in regards to his work. Peter is also the one who encouraged Dr. Adams to use calorimeters to properly measure any heat production to begin with, has a lot of correspondence letters and many photographs that have never been released to the public.
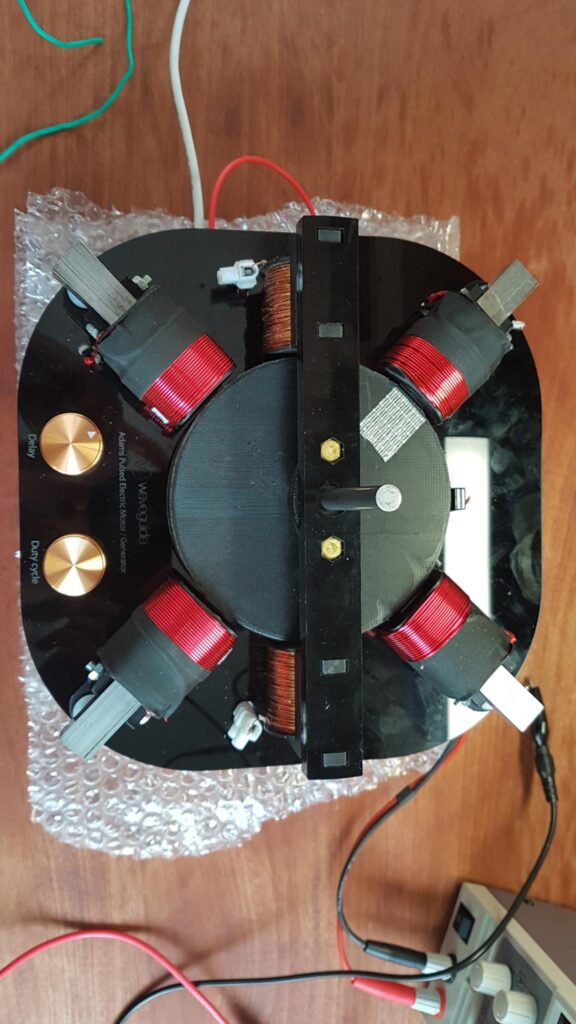
Nick Kraakman from The Netherlands is a software developer who has been studying the works of Tesla, Adams and other energy pioneers and his presentation may just kick off a new trend of experimentation with the Adams Motor. In this presentation, some photographs from Peter’s connection are seen for the first time ever, Nick shows his replication of the Adams motor (without free energy claims) and discloses may facts about this technology that most people are unfamiliar with.
This is going to be an ongoing project that Nick is working on so get this presentation to learn more about this historical motor-generator technology:
In the near future, we’ll be releasing a 4 part series, which will be the most comprehensive collection of writings by Dr. Adams – many books, obscure writings, correspondence letters and many photographs so stay tuned for this. Nick’s presentation is the perfect Primer to prepare you for this exclusive upcoming release!
With consistency, Mike Clarke has brought his Reactive Power Generator (RPG) to a higher and higher level each year. Yes, with Paul Babcock and his partner Norm’s help, it will keep itself charged up while producing net power over time!
It runs on a battery bank, is similar to an air core Bedini SG but with a more sophisticated circuit, and charges a battery bank while BOTH banks STAY CHARGED UP… Everyone wants to see a self-running system – well, here it is.
All the while… it is turning a generator that is doing net work by lighting a bulb or bulbs – the input battery bank not only seems to not care about the load, it’s like it doesn’t even know it is powering the prime mover!
Mike has presented on this a couple times already and this is the third time – each time gets better and better! The higher up in voltage he goes with the battery bank, the more efficient the system gets and he even shares one of the most crucial pieces of information – his battery swapping methodology – how he swaps the front and back batteries back and forth.
This motor has run countless hours on these battery banks and it has been many, many months since they’ve been charged up initially – it just keeps running and running and running and the batteries never drop! Get a copy of this presentation so you can see his latest results – wait until you see the scope charts of the batteries over time…they’re mind blowing.
If you saw Paul Babcock’s presentation on Zero Entropy States, you’ll now see how that is applied in practice to keep some battery banks apparently indefinitely charged up – all by the nature of the RPG itself. Also, once again, John Bedini has been right all along.
Nick Kraakman who has been collaborating with Peter Lindemann behind the scenes is bringing an Adam’s Motor to the 2021 ESTC. Nick will be showing some never before seen pictures of some of Dr. Robert Adams machines that were sent to Peter Lindemann years ago. Peter corresponded with Dr. Adams for years and has compiled more booklets, pictures and letters from Dr. Adams regarding the Adams Motor than anyone that we know of. This information and pictures will all be available in digital downloadable format after the conference.
There are very specific features about the circuit and coils that are no immediately apparent, which give advantages to it’s efficiency and coefficient of performance (COP). This will all be explained at the conference.
Also, get your tickets to the 10th Annual Energy Science & Technology Conference where we will be demonstrating this and more 🙂 – Learn more about the Energy Conference here: https://energyscienceconference.com
In 1999, when John Bedini was first introduced to me, this “Glass Case Motor” was the first thing he wanted to show me so it had always been very special to me but it was even more special to John. It is a beautiful work of art that John built because it embodied the many principles that were worked out over the years with his partner from the past, Ron Cole.
The first time he ever presented it publicly was at the 2015 Energy Science & Technology Conference but it was mostly a demonstration along with the history and some of the thinking behind it but he never disclosed the circuit specs, coil details, etc.
John Bedini’s Glass Case Motor – Gravity Wave Space Flux Motor
The interesting or even profound thing about this “glass case motor”, which John actually called the Gravity Wave Space Flux Motor, is that it had run countless hours over the years on 30 year old either alkaline or zinc carbon batteries. The batteries had been seen to be in such poor shape that they were practically falling apart but nevertheless, once the rotor is spun, it picks up speed, turns a propeller shaft with eddy currents, blinks LEDs but the batteries never seem to die.
The long-awaited, full-disclosure that everyone has wanted but never thought would happen is coming to the 2020 Energy Science & Technology Conference.
While we may not be able to claim we know all the answer as to why this particular arrangement of coils, magnets, etc. can demonstrate these amazing feats and we may not be able to claim that we see this motor the same way John did as he had his own unique way of looking at things, you will will walk away with all the information necessary to replicate this historical and amazing machine!
Get your ticket now while you can for our 9th annual event – 2020 Energy Science & Technology Conference – register now: 2020 Energy Conference