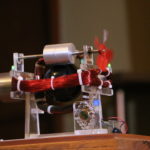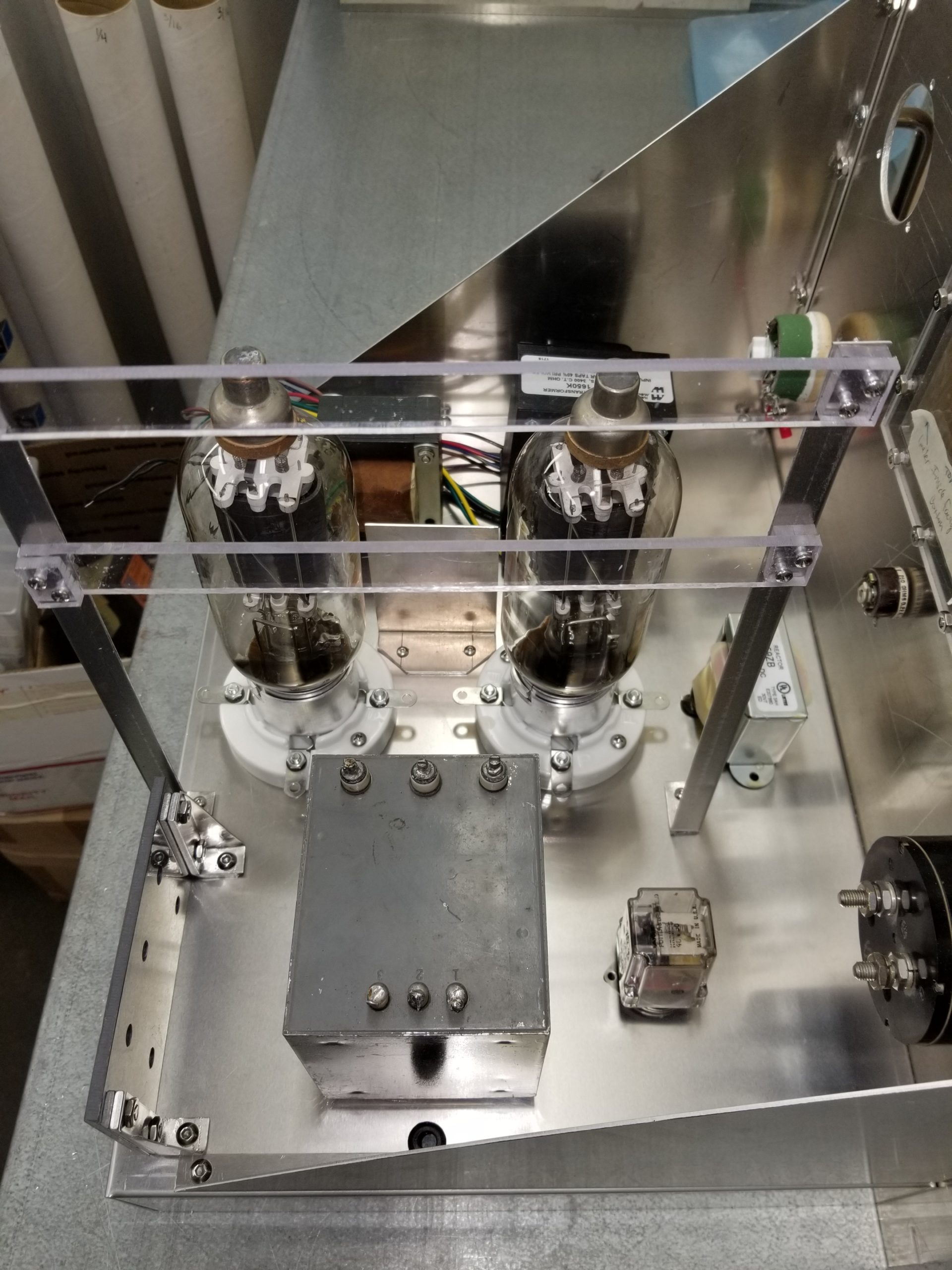
Here’s a quick look at the HV Rectifier panel I’m building based on Eric’s design along with more progress on the Linear Audio Modulator.
What’s the point to all of this? I have to 19 inch wide and about 6 ft tall Air Force racks for rack mount equipment. One rack will have all the audio and the other rack will have all the RF equivalents.



The audio rack will have a signal generator that will feed a 30 watt amp, which feeds the audio modulator you see in the video with the 810 tubes, that works in conjunction with the HV rectifier unit, which then outputs to the output transformer. This will turn whatever signal or audio I put into the input into a 5kv output at ultra high fidelity, which can do a lot of things, which I’m not going to reveal yet. If this is all done in time for the conference, there may be a couple demonstrations, which is the goal.
The RF rack will have almost the same setup but for radio frequencies. When mixed with the audio setup, it will be able to demonstrate a flame speaker like what Eric demonstrated at last year’s conference with the 20:1 scale model Tesla’s Colorado Springs Tesla Transformer. However, with the setup I’m building, it may have a flame that is 18 inches long approaching at over 80dB so it will probably literally knock you out of your chair.
The RF side may not be done until next year’s conference. I’m working as fast as I can, which is a challenge since I have to organize the 2020 ESTC and run a couple businesses but I’m getting there!
The 2020 Energy Science & Technology Conference is already 1/3 sold out so get your tickets while you can – come meet Eric Dollard live! http://energyscienceconference.com
You may have seen Tesla coils online outputting audio – but those are almost always PWM (pulse width modulated) and the quality of the sound is similar to a 1980’s Mario Brothers video game so not very impressive. This is RF modulated and is a huge difference. The above-mentioned setup will be the highest quality audio you’ve ever heard in your life as well as being extremely holographic – it will be coming right out of space and is not associated spatially with any speaker or possibly even the flame. If Tesla made a sound system, this is what it would be.
This will also be able to replicate the full Cosmic Induction Generator designed by Eric years ago with the golden ratio discharges and more. It will demonstrate the destruction of energy and quite a few other things that completely smash the so-called “Laws of Physics.”
Anyway, it’s an expensive project, so if you want to donate to the project to make it easier on all of us, please donate by PayPal here: http://ericpdollard.com/donate-to-eric-dollard/